
日前,中国科学院深圳先进技术研究院医疗机器人与微创手术器械研究中心副研究员高兴团队研发出新型磁斥力非接触式谐振耦合双锥体介电弹性体驱动器(Magnetically Coupled Dielectric Elastomer Actuator,MCDEA),该软体驱动器采用新型电-磁-力耦合机制,具有双自由度、紧凑仿生拮抗机构、高功率密度与高机电效率等特点,并利用驱动器自身弹性、柔性(非接触式谐振)耦合等特点实现共振驱动,解决了软体驱动器在高阻尼负载条件下功率输出大幅减少的关键问题。相关研究成果相继在线发表于Applied Physics Letters、Advanced Materials Technologies 和Physical Review Applied。团队中曹崇景为系列论文第一作者,高兴为通讯作者。
软体机器人因其优越的结构与环境顺应性在近10年来成为国际研究热点。软体机器人由软材料构成,能够通过自身形变自适应非结构化的未知环境,已在医疗、侦察、救灾等诸多领域展现出广阔的应用前景。气动型软体机器人是发展较为成熟且应用面较为广泛的一类软体机器人。然而由于缺乏可用于气动软体机器人的软体气泵,导致现如今的气动软体机器人通常需要通过软管连接较大的外部气压控制系统进行操控,限制了其在诸多领域的应用前景,如远程特种机器人。因此气动型软体机器人的动力源问题一直困扰着研究人员。
由于嵌入式刚性驱动气泵将使软体机器人损失一定柔顺性,所以软体气泵需由软体驱动器构成,并且需具有可扩展性好、能适用于不同尺度的软体机器人的结构特点。在功能上,需具有流速快、输出气压大等特点。介电弹性体驱动器(Dielectric Elastomer Actuator, DEA)是一种新型的软体驱动器,其可扩展性好,输出性能好且稳定易于控制。DEA由一片介电薄膜与两侧柔性电极构成,如图1.(a)所示。当对两侧柔性电极施加一定电势差时,产生的Maxwell应力挤压薄膜,使薄膜厚度减小的同时平面内面积增大(图1.(b))。此软体驱动原理使介电弹性体既能作为封闭泵腔体的薄膜,又能作为泵的动力源,完美地适用于薄膜型流体泵的驱动器。然而,这种设计也带来了新的问题,由于介电弹性体直接对压缩空气做功,压缩空气的阻尼效应大大降低了泵的流速、气压与能量转换效率等关键输出性能。这种影响在高频驱动下尤为显著,也使得利用薄膜弹性实现高频共振、提高输出性能这一共振机制无法实现。
为解决此难题,高兴首次提出双锥形DEA的电-磁-力柔性(非接触式)耦合机理,由曹崇景研发出新型磁斥力柔性耦合双锥体介电弹性体驱动器(MCDEA,Applied Physics Letters;doi.org/10.1063/1.5071439)。如图2所示,MCDEA由两片平面圆形DEA通过磁斥力柔性耦合而成。与刚性耦合的双锥形DEA相比,柔性耦合能为系统增加一个额外自由度,使两片DEA能够独立驱动又通过磁斥力耦合。可最大程度降低载荷的阻尼作用对柔性驱动器的影响:即使其中一片DEA受到载荷的阻尼作用无法在固有频率共振以提高输出性能,但是因为第二片DEA不直接与载荷接触,所以不受阻尼作用依然能够共振再通过柔性耦合对第一片DEA做功。利用此核心优势,研发了可用于软体机器人的柔性驱动气泵诞生(Advanced Materials Technologies;doi:10.1002/admt.201900128,期刊封面,图3)。MCDEA气泵利用共振原理,极大地提高了泵输出性能与效率。通过测量,第一代小型气泵能够产生的流速与42.5 mBar的输出气压,均为在同等功率与实验条件下的最优。
为了对MCDEA气泵做结构优化,并验证柔性耦合气泵的输出性能为现如今软体流体泵的最优以及揭示更多应用前景,团队进行动力学模型分析(Physical Review Applied;doi.org/10.1103/PhysRevApplied.12.044033),理论与实验结果达到95%以上的精确度。如图4所示。该研究将复杂的非线性MCDEA系统简化为三弹簧与两质量的经典动力学模型,并使用Gent模型描述介电弹性体的超弹性力,以及Kelvin-Voigt模型描述薄膜与柔性电极的粘弹性力。在此理论模型的指导下,一些新的现象将有望进行新的探索与应用:通过调整激励电压信号控制两片DEA的输出相位差,由此开发出新型通过控制相位差的高频振动控制策略;通过控制激励信号的频率差产生可控和声共振,可用于复杂系统的减震以及声学应用中。该电-磁-力耦合技术将在未来运用在介入和自然腔道手术机器人中并起到颠覆性作用。
该研究工作得到深圳先进院微创中心研究员王磊的指导,以及布里斯托大学博士Tom Hill、Andrew Conn、西安交通大学机械学院副教授李博的帮助,并得到国家自然基金重点项目(U1713219)、国家自然基金(91748124)与深圳市介入诊疗一体化关键技术与工程实验室等资助。
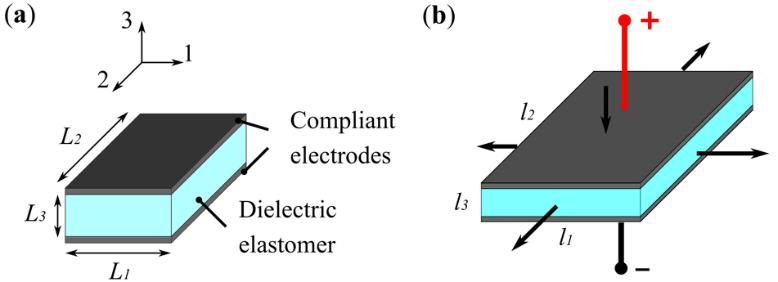
图1. 介电弹性体驱动器(a)组成和(b)驱动方式。
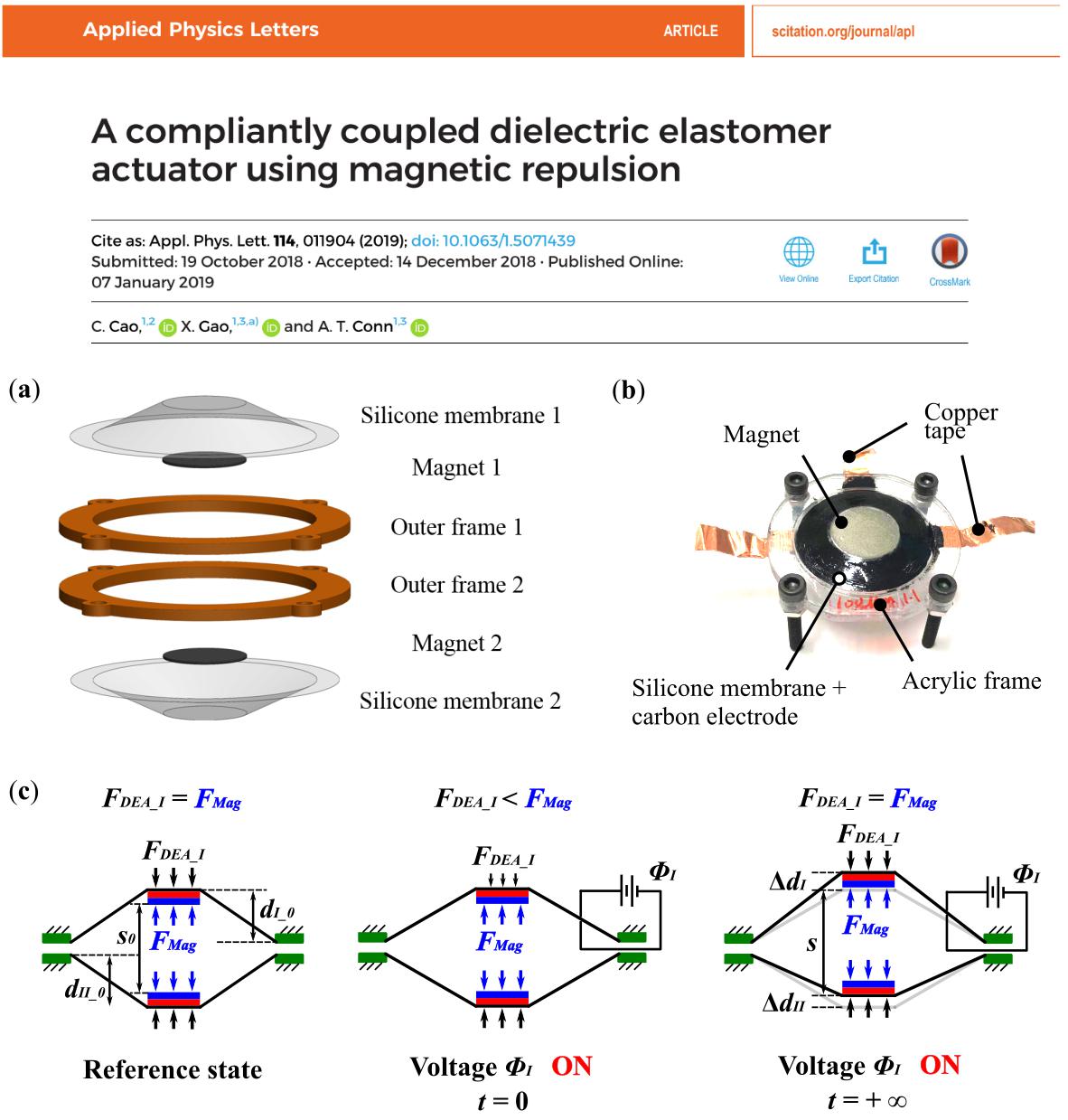
图2.(a)磁斥力柔性耦合双锥体介电弹性体驱动器结构组成。(b)驱动器实物图。(c)驱动器工作机理。
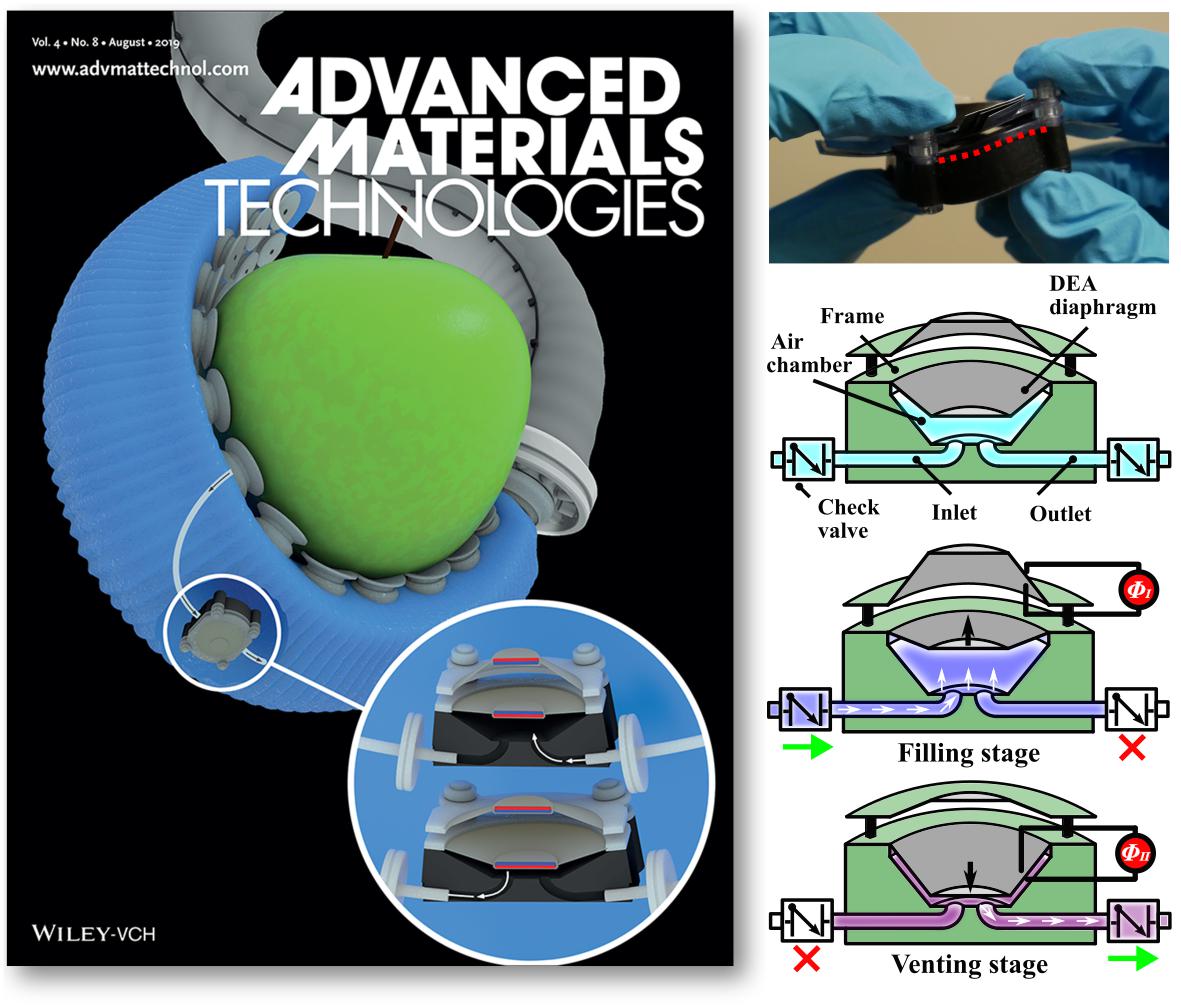
图3.首款利用介电弹性器共振机制驱动的柔性气泵,被选为2019年8月的AMT期刊主封面。
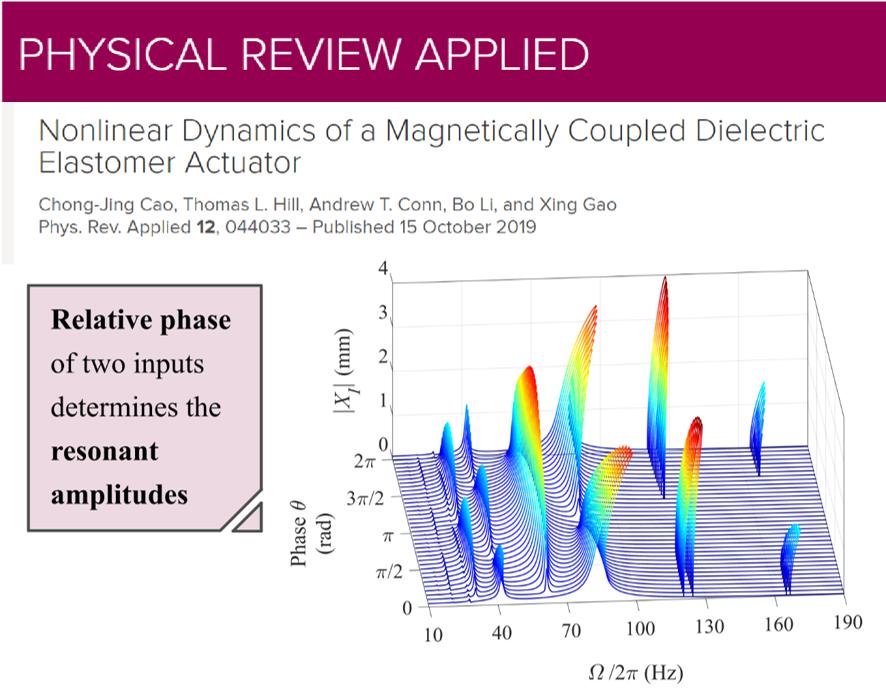
图4. MCDEA的非线性动力学模型与新型高频振动控制策略
| 相关新闻: |
| 深圳先进院长效锂金属电池研究取得进展 |
| 深圳先进院等在电催化甲烷氧化转化研究中取得进展 |
| 深圳先进院等发表多铁材料前瞻展望 |


京公网安备110402500036号
© 中国科学院微电子研究所 版权所有
地址:北京市朝阳区北土城西路3号 邮编:100029
邮箱:icac@ime.ac.cn
学习园地