
近日,中国科学院沈阳自动化研究所机器人学国家重点实验室微纳米自动化课题组在磁控连续体微型机器人方面取得的最新研究成果(A Flexible Magnetically Controlled Continuum Robot Steering in the Enlarged Effective Workspace with Constraints for Retrograde Intrarenal Surgery),作为前封面文章(Front Cover)发表在Advanced Intelligent Systems上。
微创手术是现代医学的标志,手术导管机器人可以帮助医生对病人狭小腔道内的组织结构进行精确微创干预治疗。然而,微型化、智能化是手术导管机器人的发展趋势及面临的挑战。传统手术软镜导管由于机械拉线驱动方式的限制,较难进一步缩小整体尺寸且保证其可控性,因而限制了机器人在人体内的应用范围。
该研究面向人体狭窄腔道内患病组织的精准治疗,结合微纳米技术提出了磁控连续体微型机器人的方法。该连续体机器人采用PDMS材料制备,包括PDMS软管及磁性前端(总直径2mm)。研究采用外磁场驱动,可控制该连续体机器人进行灵活弯转、在管道内穿行等动作。针对肾内逆行手术,研究论证了其在狭窄通道内的灵巧运动性能及控制能力。同时,该柔性机器人可进一步缩小尺寸到亚毫米级,可面向人体更狭小腔道内组织结构进行灵活可控的微创治疗,如脑神经外科、眼内手术或血管内手术等。针对目前磁控系统有效工作空间受限问题,该工作还提出了一种有效扩大磁控连续体机器人工作空间的解决方案,为面向临床应用奠定了基础。
微纳米课题组专注于微纳米机器人研究,从毫米级、微米级到纳米级机器人开展了系列研究,在磁驱动毫米机器人、光驱动毫米机器人、热驱动毫米机器人、气泡微米机器人、细胞微米机器人、混合驱动纳米机器人等方面取得了研究进展,相关成果发表在Small(2019)、ACS Applied Materials & nterfaces(2019/2020/2021)、IEEE Robotics and Automation Letters(2021)、Chemical Engineering Journal(2021)、Lab on a Chip(2016)上。
研究工作得到国家重点研发计划、国家自然科学基金、中科院青年创新促进会、中科院创新交叉团队,以及机器人学国家重点实验室的支持。
Advanced Intelligent Systems封面刊载
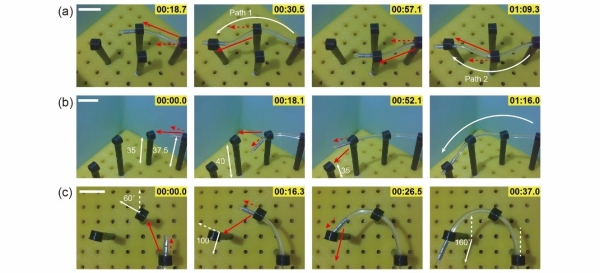
连续体机器人灵巧通过各种狭窄通道
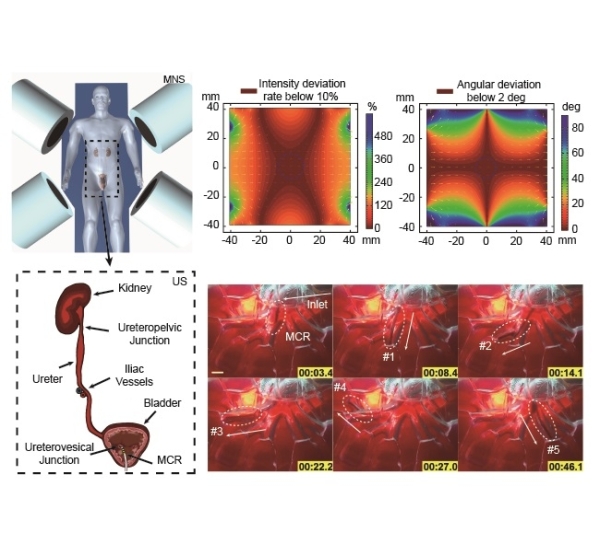
扩大电磁驱动系统有效操作空间
| 相关新闻: |
| 沈阳自动化所可重构分子机器人研究获进展 |
| 沈阳自动化所发表纳米机器人及其生物医学应用研究综述文章 |
| 《自然》刊发微型机器人新突破:细如发丝,兼容硅电子器件 |


京公网安备110402500036号
© 中国科学院微电子研究所 版权所有
地址:北京市朝阳区北土城西路3号 邮编:100029
邮箱:icac@ime.ac.cn
学习园地