
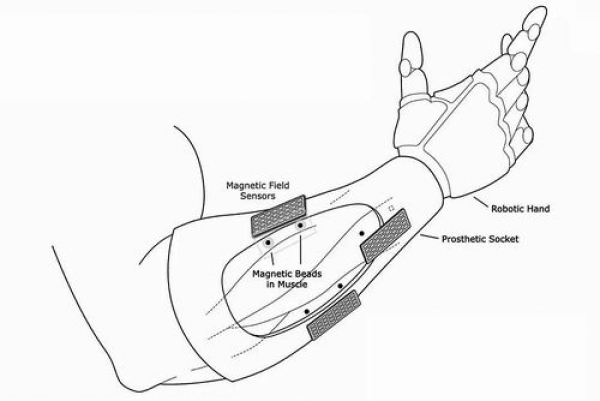
磁微测量法工作原理示意图 图片来源:《科学—机器人》
在近期出版的《科学—机器人》上,美国麻省理工学院(MIT)的一个研究团队发表文章称,他们开发出一种控制假肢的新方法,名为磁微测量法(Magnetomicrometry)。该方法是把小磁珠植入截肢残肢的肌肉组织,通过小磁珠在肌肉收缩时测量肌肉的运动量,几毫秒内就能把相关信息传递给假肢,有可能比此前广泛使用的利用肌电信号控制假肢的方法更加精确。而这篇文章的标题就是Magnetomicrometry。
值得一提的是,该项目负责人、MIT媒体实验室教授、该校生物机电一体化研究小组主任休·赫尔本人就安装有假肢。因为他在 17 岁时的一次攀岩中,因遭遇冻伤下肢被迫截肢。
这些年,休·赫尔带领团队通过技术创新,不断制造出佩戴更舒适的假肢。第一个受益人当然是他自己。对比当初被截肢后躺在床上的落寞,如今他不仅重新找回攀岩的乐趣,也帮助了更多像他一样的患者。
或可取代肌电信号
对于截肢患者而言,最大的挑战就是控制假肢像正常肢体一样运动。这一点也是科学家不断努力的方向。
此前,截肢患者控制假肢是基于肌电信号,即将电极连接在皮肤表面或植入肌肉以获取肌肉电信号。通过肌电信号控制假肢的原理,首先是读取患者残肢附近残留肌肉的肌电信号,然后解码该信号获取患者的运动意向,再传递给假肢去执行。经过一定时间的适应性训练,患者就能够借助假肢恢复生活必需的简单活动。
然而,对于截肢患者来说,想要完全恢复正常运动并不容易。目前的假肢控制方式要么控制范围有限,要么手术及植入费用昂贵。为了让更多同他一样的截肢患者回归正常生活,休·赫尔几经尝试,终于从磁铁上获得灵感。
在实验过程中,研究人员将直径为3毫米的小磁珠成对植入火鸡的腿部肌肉,每对磁珠之间的距离为3厘米。这样的距离将确保磁珠不会被互相吸引而改变位置。磁珠植入后,研究人员对其进行了测试。他们将一系列磁性传感器放到火鸡腿部外侧,发现传感器感知磁珠位置变化的精度可以达到37微米。并且,他们移动火鸡的踝关节时,可以在3毫秒内得到测量结果。
据休·赫尔介绍,当假肢应用到人类身上时,这些测量结果会被输入到计算机模型中。该模型根据截肢者剩余肌肉的收缩情况来预测佩戴者希望进行的动作。这种策略引导假肢按照截肢者希望的方式来移动,努力实现与他们想象中的肢体位置相匹配。
而且,该新方法的优点之一是只需要微创,即借助一个很小的伤口就可以将小磁珠植入到肌肉里,而小磁珠可终生保持原位且无需更换。
电子科技大学四川省脑科学与类脑智能研究院院长尧德中在接受《中国科学报》采访时表示,此前通过解码肌肉运动相关的电信号,先判断人要干什么,再去控制假肢。而磁微测量法则是通过外界安装磁珠,再测量肌肉相关运动引起的磁场变化的方式,去确定人要干什么,两者有着本质的区别。因此,“这两种研究是并行的,不存在替代问题”。尧德中表示。
未来应用广泛
研究人员称,接下来的研究将围绕膝盖以下截肢的患者开展,另外他们还设想将用于控制假肢的传感器固定在衣服、皮肤表面或假肢的外部。
而除了帮助截肢患者外,磁微测量法甚至对于脊柱损伤的患者同样适用。因为其可以通过一种被称为功能性电刺激的技术来改善肌肉控制,该技术目前被用于帮助脊髓损伤患者恢复活动能力。
此外,磁微测量法还有个潜在用途——引导机器人外骨骼,让它连接到脚踝或其他关节上,以帮助中风患者或肌肉无力人群进行运动。
在休·赫尔看来,磁珠和外骨骼就像人工肌肉,可以放大中风受损肢体的生物肌肉输出,“这就像汽车上使用的动力转向装置”。
尧德中认为,通过磁微测量法监测肌肉运动的研究为控制假肢与外骨骼等提供了新的思路,但若是植入磁珠者所在环境存在足以影响磁珠磁力的外磁场,则可能会影响其行动,甚至带来危险。
| 相关新闻: |
| 人造皮肤感知远超人类神经 |
| 新型“虚拟现实皮肤”能传递触觉 |
| 新技术让截肢者用意念控制机械手 |


京公网安备110402500036号
© 中国科学院微电子研究所 版权所有
地址:北京市朝阳区北土城西路3号 邮编:100029
邮箱:icac@ime.ac.cn
学习园地