
近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队在微型机器人研究中取得进展,针对相同磁场下多个磁驱动软体微型机器人接收相同磁场而难以独立控制的问题,团队提出一种完全解耦的多磁驱动软体微型机器人独立控制策略,首次实现4个磁性软体微型机器人的独立位置控制和3个磁性软体微型机器人的独立路径跟随控制。
多个微型机器人可协同执行复杂的任务,从而增加系统冗余度和扩展性,提高任务执行效率。然而独立控制多个由外界磁场驱动的微型机器人具有挑战,因为全局磁场中的多个微型机器人受到的磁场信号是相同的,难以实现选择性地独立驱动多个微型机器人中的某一个。
该研究提出一种新颖的多个磁驱动微型机器人完全解耦的独立控制策略,可实现独立控制4个微型机器人分别去往不同目标位置,以及控制3个微型机器人分别跟踪不同的参考路径。首先,设计了一种毫米级软体微机器人,可被外界振荡磁场驱动,并在平面上进行爬行运动。其次,设计并制作了一系列具有相同几何形状但磁化方向不同的异构软体微型机器人,这些不同磁化方向的软体微型机器人对振荡磁场的速度响应曲线相同,但相位不同。然后,基于异构机器人的速度响应模型,设计了最优独立驱动控制算法,可针对微机器人群期望的速度矩阵计算出相应的最优驱动磁场策略,实现被选择的一个机器人速度非零,其他的近似为零。
仿真及实验验证了多个磁驱动微型机器人完全解耦的独立控制策略。实验结果表明,2至4个异构软体微型机器人的完全解耦独立控制是可行的,且当机器人数量不断增加时,可能存在步态不稳定、速度耦合的情况,但通过反馈控制得到优化。实验中采用了基于视觉的伺服控制方法,实现了最多4个微型机器人的位置控制和3个毫微米机器人的路径跟踪控制,控制误差小于身体长度的三分之一。研究还讨论了最多可被独立控制的微型机器人数量,探讨了增加最大数量可能的方法。
相关成果发表在机器人领域期刊IEEE Transactions on Robotics上。研究得到国家重点研发计划、国家自然科学基金,以及广东省、中科院、深圳市等科技项目的资助。
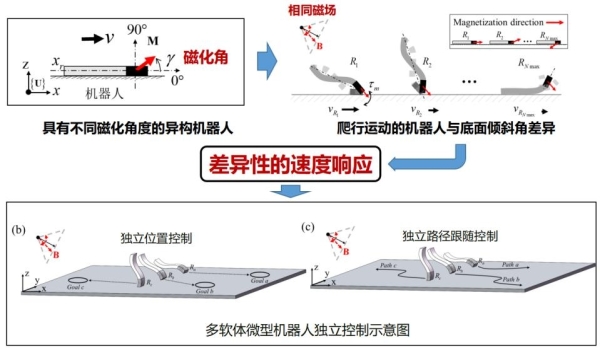
多个磁驱动软体微型机器人独立控制示意图

多个磁矩异构的软体微型机器人在相同振荡磁场中具体不同的速度响应
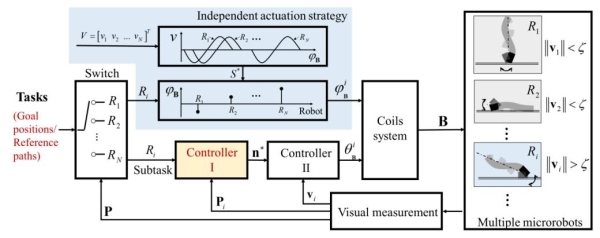
图3:多个磁驱动软体微型机器人完全解耦的独立控制策略框图

多个磁驱动软体微型机器人被独立控制前往不同目标位置
多个磁驱动软体微型机器人被独立控制跟随不同参考路径
| 相关新闻: |
| 沈阳自动化所外肌肉机器人研究获进展 |
| 《自然》刊发微型机器人新突破:细如发丝,兼容硅电子器件 |
| 沈阳自动化所磁控连续体微型机器人研究获进展 |


京公网安备110402500036号
© 中国科学院微电子研究所 版权所有
地址:北京市朝阳区北土城西路3号 邮编:100029
邮箱:icac@ime.ac.cn
学习园地