

图片来源: Del Dottore et al.
藤蔓机器人,像其名字一样可以蜿蜒生长在树木或岩石周围,以建造房屋或测量人类目前难以企及的自然环境中的污染情况。
这种机器人并不是新鲜事物,但传统藤蔓机器人一般只依靠一种因素向上生长,比如热或光,这意味着它们在某些环境中表现得并不理想。
为此,意大利技术研究院的Emanuela Del Dottore和同事开发了一种新的藤蔓机器人——FiloBot。它以光线、阴影或重力等为导向因素,通过熔化和挤压塑料丝线将其缠绕成圆柱形,再冷却固化,从而“打印”出自己的身体,即生长。机器人头部通过一根细软管连接在基座上,用于“打印”自身的塑料材料通过软管被输送上来。
“我们的机器人有一个嵌入式微控制器,可以处理多种刺激,并将头部引导至精确位置生长,确保身体结构得到保护。”Dottore介绍,这种对头部方向的精细控制意味着机器人可以将自己包裹在树上或将树叶的阴影部分作为路标,轻松地在陌生地形上找到前进方向。
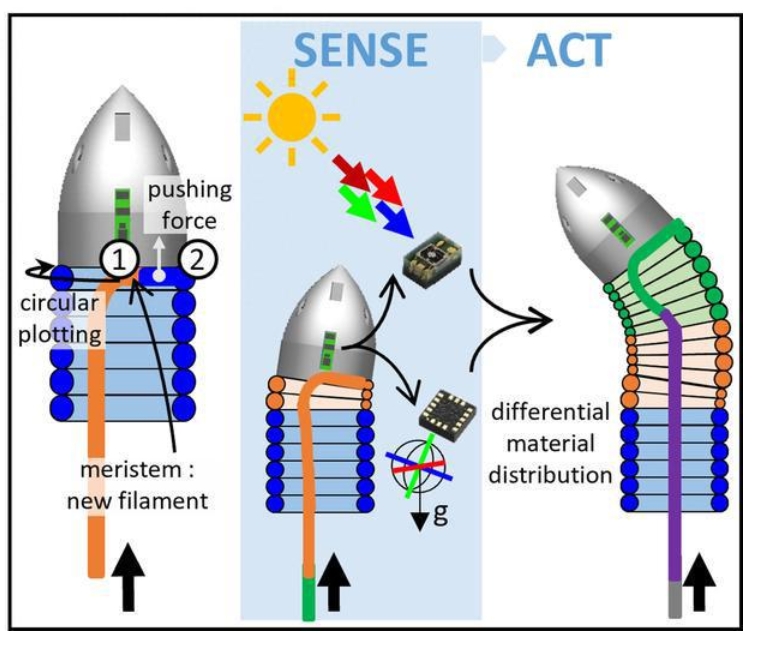
FiloBot 的头部示意图 Del Dottore et al. 9, Eadi5908 (2024)
FiloBot每分钟可生长7毫米。这一生长速度虽然慢于许多传统机器人,但这意味着FiloBot不会破坏敏感的自然环境。

目前,研究团队还没有明确FiloBot的具体用途,但希望它能被部署到树梢等人类难以到达的地方收集数据。相关研究近日发表于《科学-机器人》。
| 相关新闻: |
| 真牛!皮牛弹簧打造超灵敏机器人 |
| 新技术让水下机器人拥有“触觉” |
| “无脑”机器人可逃脱复杂迷宫 |


京公网安备110402500036号
© 中国科学院微电子研究所 版权所有
地址:北京市朝阳区北土城西路3号 邮编:100029
邮箱:icac@ime.ac.cn
学习园地